
3D相機(jī)選型指南
一、前言
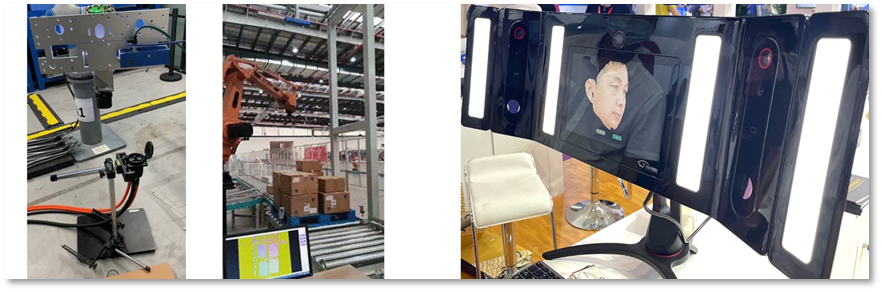
3D相機(jī)的應(yīng)用在我們身邊已是越來越常見。在工業(yè)場(chǎng)景中,如自動(dòng)化工廠的抓取上下料、焊接打磨切割、生產(chǎn)過程中產(chǎn)品檢測(cè)、拆碼垛等應(yīng)用。而在消費(fèi) 端,人們常見的無人售貨機(jī)的刷臉支付,小區(qū)學(xué)校高鐵站等布置的人臉識(shí)別門禁,牙科里牙齒的模型掃描,醫(yī)美行業(yè)面部美容前后的三維重建等??梢?,3D相機(jī)的選型在視覺項(xiàng)目開發(fā)與部署中占據(jù)著舉足輕重的地位。
如何更好的選擇一款合適的3D相機(jī),首先我們需要認(rèn)識(shí)3D相機(jī)的主要原理有哪些,不同工作原理的優(yōu)劣勢(shì)是怎樣的,不同廠商3D相機(jī)的主要特征、重要參數(shù)是怎樣的。只有對(duì)這些內(nèi)容進(jìn)行深入的了解,才能為項(xiàng)目挑選到合適的3D相機(jī),加速項(xiàng)目落地。
二、3D相機(jī)的主要成像原理及其優(yōu)劣勢(shì)
2.1 主流3D成像方案
2.1.1雙目視覺原理
雙目立體視覺由三角法原理進(jìn)行三維信息的獲取,即由兩個(gè)攝像機(jī)的圖像平面與被測(cè)物體之間構(gòu)成一個(gè)三角形。已知兩個(gè)攝像機(jī)之間的位置關(guān)系和物體在左右圖像中的坐標(biāo),便可以解算出兩攝像機(jī)公共視場(chǎng)內(nèi)物體的空間位置信息。所以,雙目視覺系統(tǒng)一般由兩個(gè)攝像機(jī)構(gòu)成。其原理圖如下所示:
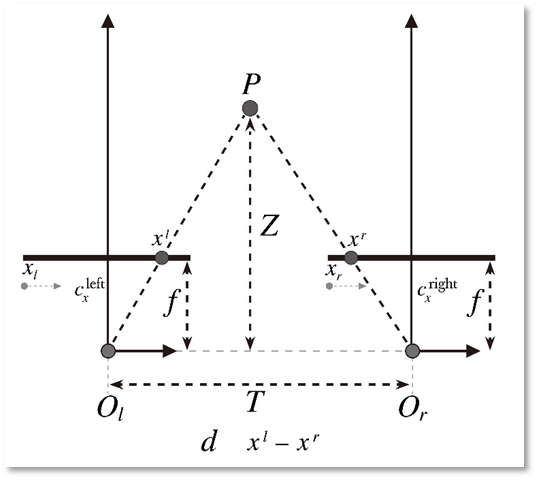
根據(jù)相似三角形得到以下等式進(jìn)而推算出Z:

2.1.2激光三角測(cè)量原理
如下圖所示,激光頭與攝像頭在同一水平線(稱為基準(zhǔn)線)上,其距離為s,攝像頭焦距為f,激光頭與基準(zhǔn)線的夾角為β。假設(shè)目標(biāo)物體在點(diǎn)狀激光器的照射下,反射回?cái)z像頭成像平面的位置為點(diǎn)P。
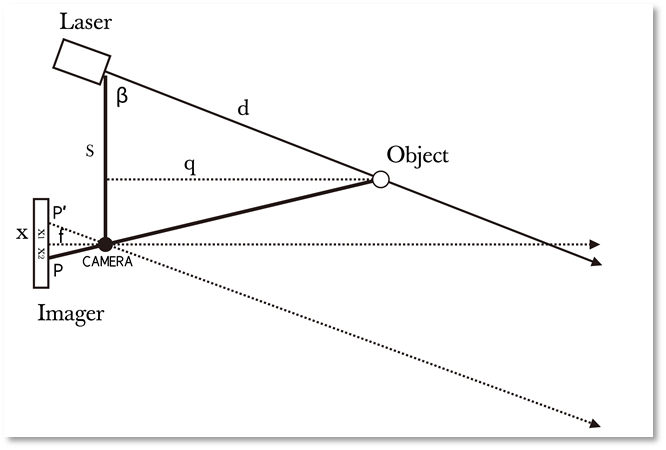
由幾何知識(shí)相似三角形可得:f/x=q/s ==> q=fs/x
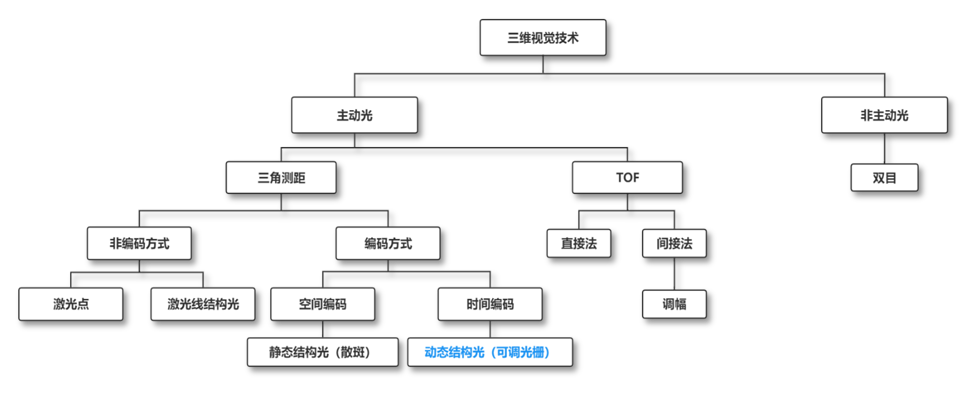
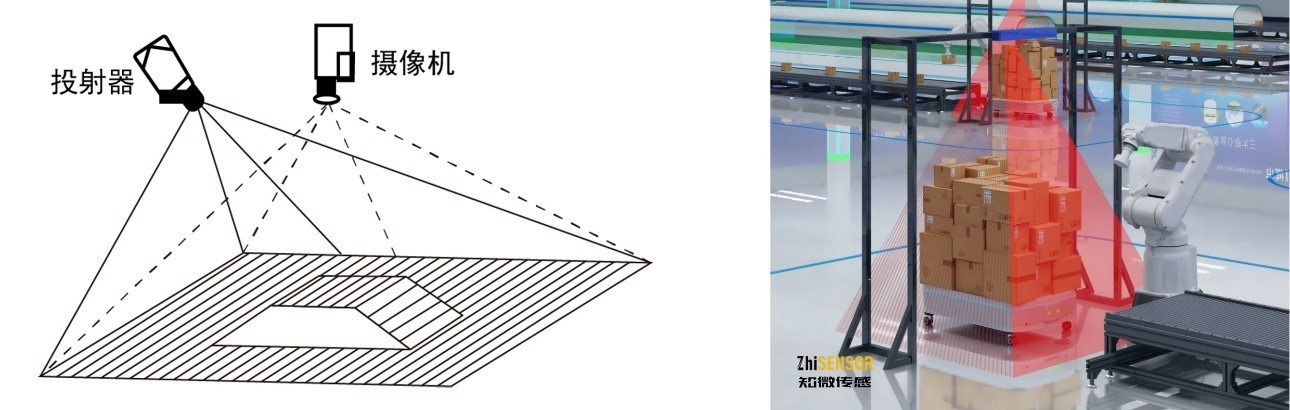
2.1.3結(jié)構(gòu)光3D成像原理
結(jié)構(gòu)光法屬于主動(dòng)式測(cè)量,通過投射器將編制好的編碼結(jié)構(gòu)光投射到物體表面,編碼結(jié)構(gòu)光經(jīng)過物體表面高度的調(diào)制后產(chǎn)生扭曲并被攝像機(jī)接收,通過后期圖像處理和解碼完成像素點(diǎn)匹配,最后基于三角測(cè)量原理實(shí)現(xiàn)物體的三維重建。
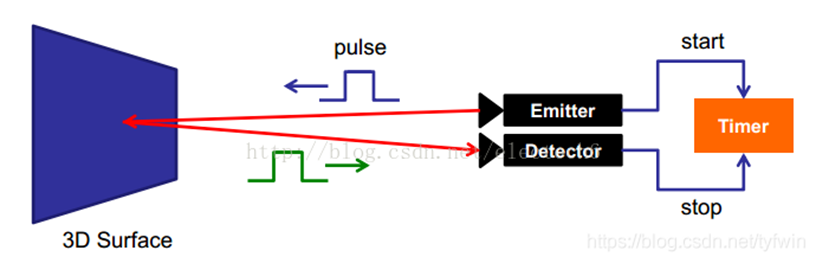
2.1.4 TOF(Time Of Flight)成像原理
TOF是通過連續(xù)或脈沖波打在物體表面,再通過傳感器接收返回的光,通過測(cè)量波的飛行時(shí)間測(cè)得物體的距離,根據(jù)調(diào)制方法的不同,一般可以分為兩種:脈沖調(diào)制(Pulsed Modulation)和連續(xù)波調(diào)制(Continuous Wave Modulation)。
脈沖調(diào)制:脈沖調(diào)制方案的原理比較簡單,如下圖所示。它直接根據(jù)脈沖發(fā)射和接收的時(shí)間差來測(cè)算距離。
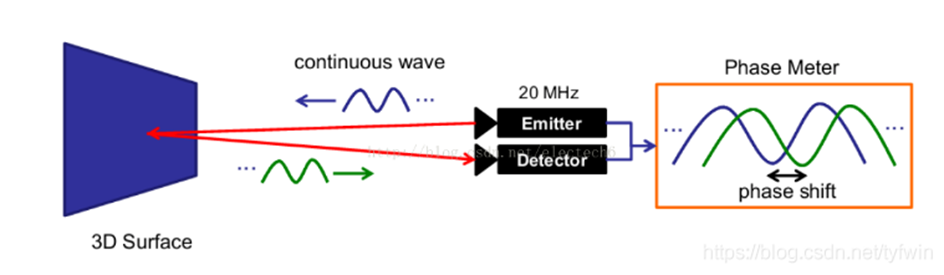
連續(xù)波調(diào)制:實(shí)際應(yīng)用中,通常采用的是正弦波調(diào)制。由于接收端和發(fā)射端正弦波的相位偏移和物體距離攝像頭的距離成正比,因此可以利用相位偏移來測(cè)量距離。
2.2主流成像方案優(yōu)劣勢(shì)簡述
在光源的依賴性上:基于主動(dòng)光技術(shù)的三維成像,其成像時(shí)內(nèi)部自帶光源,不依賴外部環(huán)境光,而非主動(dòng)光技術(shù)的雙目方案,其成像則依靠外界光,無法適應(yīng)昏暗的應(yīng)用場(chǎng)景。
在成像質(zhì)量與精度上:線激光結(jié)構(gòu)光方案(絲級(jí))>條紋光柵結(jié)構(gòu)方案(亞毫米級(jí))>散斑結(jié)構(gòu)光方案(毫米級(jí))>TOF方案(厘米級(jí))。
在成像速度上:TOF方案>散斑結(jié)構(gòu)光方案>條紋光柵結(jié)構(gòu)光方案>線激光結(jié)構(gòu)光方案。
三、3D相機(jī)選型需關(guān)注的典型指標(biāo)
3.1 3D相機(jī)分辨率與像元
分辨率作為相機(jī)的基本參數(shù)之一,是指傳感器(CCD或CMOS)芯片靶面排列的像元數(shù)量。
面陣相機(jī)的分辨率用水平和垂直分辨率表示,如:1280(寬)× 1024(高)。線陣相機(jī)的分辨率通常表示為K,如1K(1024),表示一行由1024個(gè)像元。在對(duì)同樣大的物體成像時(shí),分辨率越高,能夠顯示更多細(xì)節(jié)。
3.2 3D相機(jī)的幀率及成像時(shí)間
成像時(shí)間,一般約定為成像的延時(shí),包含:投射+拍攝+點(diǎn)云計(jì)算+數(shù)據(jù)傳輸?shù)倪^程的耗時(shí)。
3.3 3D相機(jī)的FOV
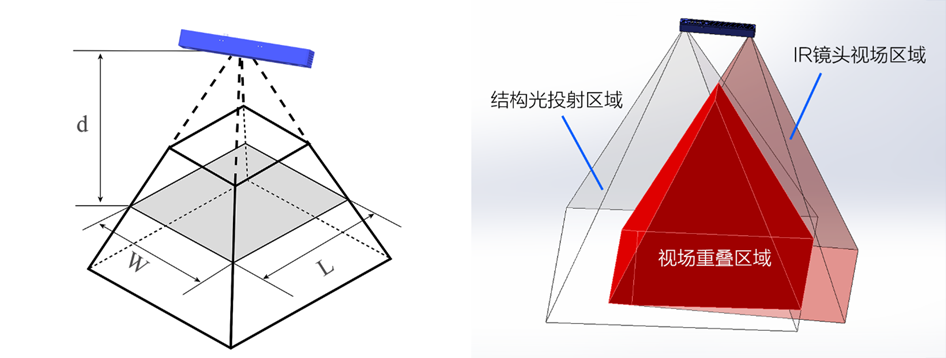
以單目結(jié)構(gòu)光相機(jī)為例,其有效的視場(chǎng)范圍為其結(jié)構(gòu)光投射器的視場(chǎng)與其鏡頭成像視場(chǎng)的重疊區(qū)域?yàn)橛行^(qū)域。如下圖紅色區(qū)域?yàn)橛行б晥?chǎng)范圍:
3.4 3D相機(jī)的工作距離和景深
工作距離指3D相機(jī)的最近端的拍攝離被測(cè)物表面的距離及最遠(yuǎn)的距離的區(qū)間,景深是指最近端和最遠(yuǎn)端的工作距離的差值。
對(duì)于景深的選擇,以普通的深框抓取為例,定義料框大小為長寬高=500mm*500mm*1000mm,其W和H方向的點(diǎn)云需要覆蓋700mm*500mm,咱們?cè)谶x型的時(shí)候需要確定其能滿足這個(gè)視野時(shí)相機(jī)的工作距離,同時(shí),在該距離下再加上料框的高度即為相機(jī)實(shí)際需要架高的高度,料框的高度即為我們選型相機(jī)時(shí)需要的景深。在大景深相機(jī)的選擇上,以MEMS振鏡為投射核心元器件的3D相機(jī)具有較大景深的特點(diǎn),其景深最大可達(dá)2米,可滿足大型拆碼垛等應(yīng)用場(chǎng)景。
3.5 3D相機(jī)的精度
精度測(cè)量有多個(gè)方面:①重復(fù)精度:多次測(cè)量的重復(fù)測(cè)量結(jié)果的誤差;②相對(duì)平面度:取平面上的數(shù)十萬個(gè)點(diǎn)云,擬合平面計(jì)算RMS值。
在精度的選型上,需要跟據(jù)場(chǎng)景需要的精度指標(biāo)來進(jìn)行合理選擇,如TOF目前可達(dá)厘米級(jí),散斑結(jié)構(gòu)光達(dá)毫米級(jí),以MEMS振鏡為核心投射元器件的條紋結(jié)構(gòu)光則可達(dá)亞毫米級(jí)。
3.6 3D相機(jī)的體積和重量
取決于相機(jī)的安裝方式,及選用機(jī)械臂的負(fù)載,如果相機(jī)放在機(jī)械臂末端的話,需要考慮到機(jī)械臂的負(fù)載大小來對(duì)相機(jī)的重量選型,根據(jù)現(xiàn)場(chǎng)是否存在干涉來考慮對(duì)相機(jī)體積選型。
知微傳感目前已發(fā)布的3D相機(jī)均采用以MEMS振鏡投射器投射結(jié)構(gòu)光,其MEMS振鏡投射器體積與重量與DLP光機(jī)相比,具有顯著的優(yōu)勢(shì)。

3.7 觸發(fā)信號(hào)
相機(jī)分為軟觸發(fā)和硬觸發(fā)兩種模式,軟觸發(fā)是通過調(diào)用廠商提供的軟件SDK接口來觸發(fā)相機(jī)進(jìn)行拍照;硬觸發(fā)是以外部信號(hào)源觸發(fā)相機(jī)進(jìn)行拍照,硬觸發(fā)多為IO 觸發(fā):需給上升沿或者下降沿(數(shù)字電平從低電平(數(shù)字“0”)變 為高電平(數(shù)字“1”)的那一瞬間(時(shí)刻)叫作上升沿。)。
四、小結(jié)
沒有最好的3D相機(jī),只有最適合應(yīng)用場(chǎng)景的3D相機(jī),我們要根據(jù)現(xiàn)場(chǎng)的應(yīng)用場(chǎng)景需要覆蓋的視野、需要的節(jié)拍,對(duì)應(yīng)的精度等綜合選擇相機(jī)。
五、知名3D相機(jī)廠商推薦
3D相機(jī)哪家品牌好呢?小編給大家推薦一家國內(nèi)自主研發(fā)的品牌——知微傳感(Zhisensor)。
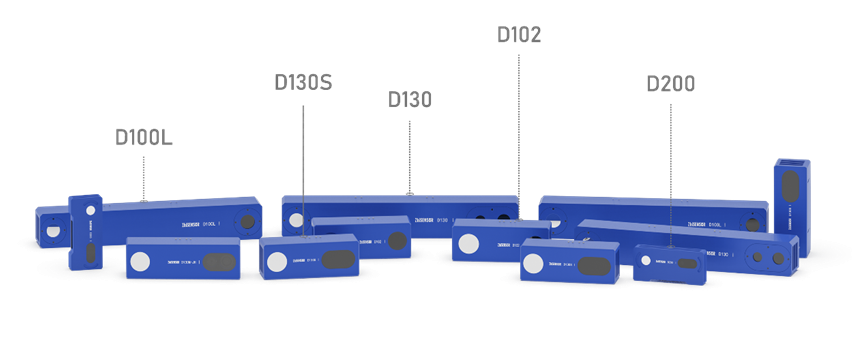
知微傳感為國內(nèi)知名的3D相機(jī)硬件提供商,其研制的3D相機(jī)采用自主研發(fā)的MEMS振鏡為投射核心元器件,結(jié)合紅外激光光源,實(shí)現(xiàn)光柵動(dòng)態(tài)結(jié)構(gòu)光投射,再利用三角測(cè)距法獲知被測(cè)物的三維信息。該系列產(chǎn)品具有精度高,體積小,重量輕,性價(jià)比高等優(yōu)勢(shì),目前已廣泛應(yīng)用在上下料,無序分揀,拆碼垛,切割焊接打磨等領(lǐng)域。

免責(zé)聲明:上面部分資料和圖片來自網(wǎng)絡(luò)或?qū)W術(shù)期刊,如有侵權(quán),請(qǐng)及時(shí)聯(lián)系作者,我們會(huì)第一時(shí)間處理。